Thermal Design robot manipulator
Robot je automatska mašina koja može zamijeniti ljudska bića da se bave opasnim i složenim radom u nestrukturiranom okruženju. To je kompleks mašina, elektronike, softvera i percepcije. Razlikuje se od potrošačkih proizvoda. Postoji mnogo delova robota. Ako se preliminarna shema ne razmotri u potpunosti, često će potrošiti mnogo ljudskih i materijalnih resursa, a ponekad i voditi cijelo tijelo. Stoga je u ranom procesu razvoja neophodno koristiti metode pouzdanosti kao što su mehaničko projektovanje, termičko projektovanje i analiza fluida kako bi se izbegli rizici, smanjio broj provera i skratio razvojni ciklus.

Zahtjevi za rasipanje topline:
Kao što je prikazano u legendi, zbog ograničenja strukture i volumena, 7 upravljačkih modula pogona mora biti integrirano na tijelo razvojnog manipulatora, a svaki upravljački modul pogona upravlja motorom. Upravljački modul pogona je aluminijumska podloga, koja je laminat obložen bakrom na bazi metala sa dobrom funkcijom odvođenja toplote; Otpornost na temperaturu aluminijumske podloge (TS) upravljačkog modula pogona je 85 stepeni. Kada temperatura pređe 85 stepeni, upravljački modul pogona prestaje da radi. Zvanična preporuka je da je TS manji ili jednak 80 stepeni. Ovaj manipulator se primjenjuje na medicinske robotske proizvode. Maksimalna temperatura radnog okruženja robota je 25 stepeni, što ima stroge zahteve za temperaturu školjke. Sedam motora radi istovremeno: 10s Manje ili jednako t Manje ili jednako 1min, a maksimalna temperatura mora biti manja ili jednaka 51 stepen.

Analize prije faze:
Upravljački modul pogona je aluminijumska podloga, tako da upravljački modul pogona treba da prenosi toplotu na strukturu kroz termalni jastučić. Prema prethodnom proračunu, potrebno je prisilno hlađenje zraka u ograničenom prostoru kako bi se osigurali ukupni zahtjevi za rasipanje topline; Postoje dva načina planiranja odvođenja topline:
1. Sedam pogonskih modula je zalijepljeno na hladnjak, a hladnjak plus ventilator aksijalnog protoka i školjka mehaničke ruke dizajnirani su za zračni kanal; Putanja toplotne provodljivosti ovog dizajna je sledeća: upravljački modul pogona → termalni jastučić → hladnjak → vazduh u šupljini (prisilna konvekcija) → omotač šupljine → vazduh izvan šupljine (prirodna konvekcija plus toplotno zračenje). Međutim, u ovom dizajnu, zrak u šupljini ne može biti direktno povezan sa vanjskim zrakom, a postoji veliki toplinski otpor u sredini, što dovodi do loših toplinskih performansi.
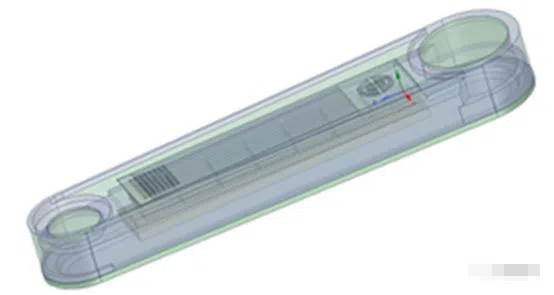
2. Sedam pogonskih modula su direktno pričvršćeni na školjku manipulatora, dodaju dizajn peraja na školjku manipulatora, aksijalni ventilator je instaliran izvan školjke manipulatora, a za dizajn kanala za zrak je dodana pokrivna ploča.
Termička simulacija:
Korištenje softvera za pametnu simulaciju za pojednostavljenje modula i nastavak termalne simulacije analizira podatke.

Prema dijagramu oblaka temperature termalne simulacije ljuske, pozicija sa višom temperaturom školjke je na desnoj strani, gornja školjka max=44.9 stepeni, min=42.35 stepeni, a aluminijum podloga kontrolne ploče pogona max=47.6 stepeni, koja zadovoljava zahtjeve dizajna.
| Podaci o termičkoj simulaciji | |
| Part | Temperatura u simulaciji |
| Modul pogona 1 | 46.62 |
| Modul pogona 2 | 46.61 |
| Pogonski modul 3 | 46.97 |
| Modul pogona 4 | 47.35 |
| Pogonski modul 5 | 47.57 |
| Pogonski modul 6 | 47.6 |
| Pogonski modul 7 | 47.28 |
| Gornja školjka | Max: 44,9 Min: 42.35 |
| Donja školjka | Max: 45,79 Min: 37.86 |
| Cover Plate | Max: 45,72 Min: 41.86 |
Kroz termičku analizu dizajna, inženjeri mogu imati dublje razumijevanje o tome kako je termički dizajn integriran u konstrukcijski dizajn u ranoj fazi projektiranja, a ova ideja se može koristiti za referencu u kasnijem procesu projektovanja za vođenje strukturalnog dizajna. Istovremeno, termička simulacija može brzo pronaći nedostatke u dizajnu i optimizirati smjer dizajna.